Autonomes Fahren war lange Zeit nur ein theoretisches Konzept. Mit dem Aufkommen von hocheffizienten Recheneinheiten und dramatischen Fortschritten im Bereich des Machine Learnings der letzten Jahre rückt diese Vorstellung aber in greifbare Nähe.

Bereits jetzt scheint die autonome Zukunft immer näher zu kommen. Trotzdem ist eine baldiges vollautonomes Fahren nicht zu erwarten. Auch die in diesem Konzept vorausgesetzte Stufe 4 wird noch einige Jahre in Entwicklung sein. Aus diesem Grund setzt dieses Konzept auf eine weiter entwickelte Augmented Reality-Technologie als diese zum aktuellen Zeitpunkt verfügbar ist.
Teilautonomes Fahren ist jedoch jetzt schon in vielen Fahrzeugen Serie. Generell wird zwischen sechs Autonomie Stufen unterschieden. Die für diese Konzept vorausgesetzte Stufe 4 beschreibt die Hochautomatisierung. Dabei wird das Fahren vollständig vom Fahrzeug übernommen. Der Fahrzeugführer kann währenddessen seine Aufmerksamkeit von der Straße nehmen. In der Stufe 4 kann es aber zu Situationen kommen, in denen das System nicht mehr autonom arbeiten kann. Ist die Führung des Fahrzeuges nicht mehr autonom möglich, so kann der Fahrer aufgefordert werden die Steuerung wieder zu übernehmen. Dazu steht ihm ein gewisses Zeitfenster zur Übernahme bereit. Während der Übergangszeit ist das Fahrzeug weiterhin uneingeschränkt in der Lage, das Auto auch in Gefahrensituationen zu führen.
MehrDurch einen elektrischen Antrieb können viele große, Platz raubende, mechanische Bauteile eines Verbrennungsmotors reduziert werden. Der gesamte klassische Motorraum mit der dazugehörigen Motorhaube kann entfallen. Diesen dazugewonnen Raum wird genutzt, um neue Konzepte vor allem im Innenraum zu ermöglichen.


Aus den Personas leiten sich mehrere Fokuspunkte des Konzeptes ab. Zum einen die Verbindung aus Arbeit und Freizeit. Hierbei soll es möglich sein, die neu gewonnene Zeit durch das autonome Fahren, nutzbar zu machen. Entweder als Zeit zum Arbeit oder Zeit als Freizeit. Zum anderen der Fokus auf das Fahren als soziales Erlebnis. Zusätlichlich erwartet unsere Persona ein qualitativ hochwertiges, edles Erlebnis und inszeniert sich und ihr Fahrzeug.
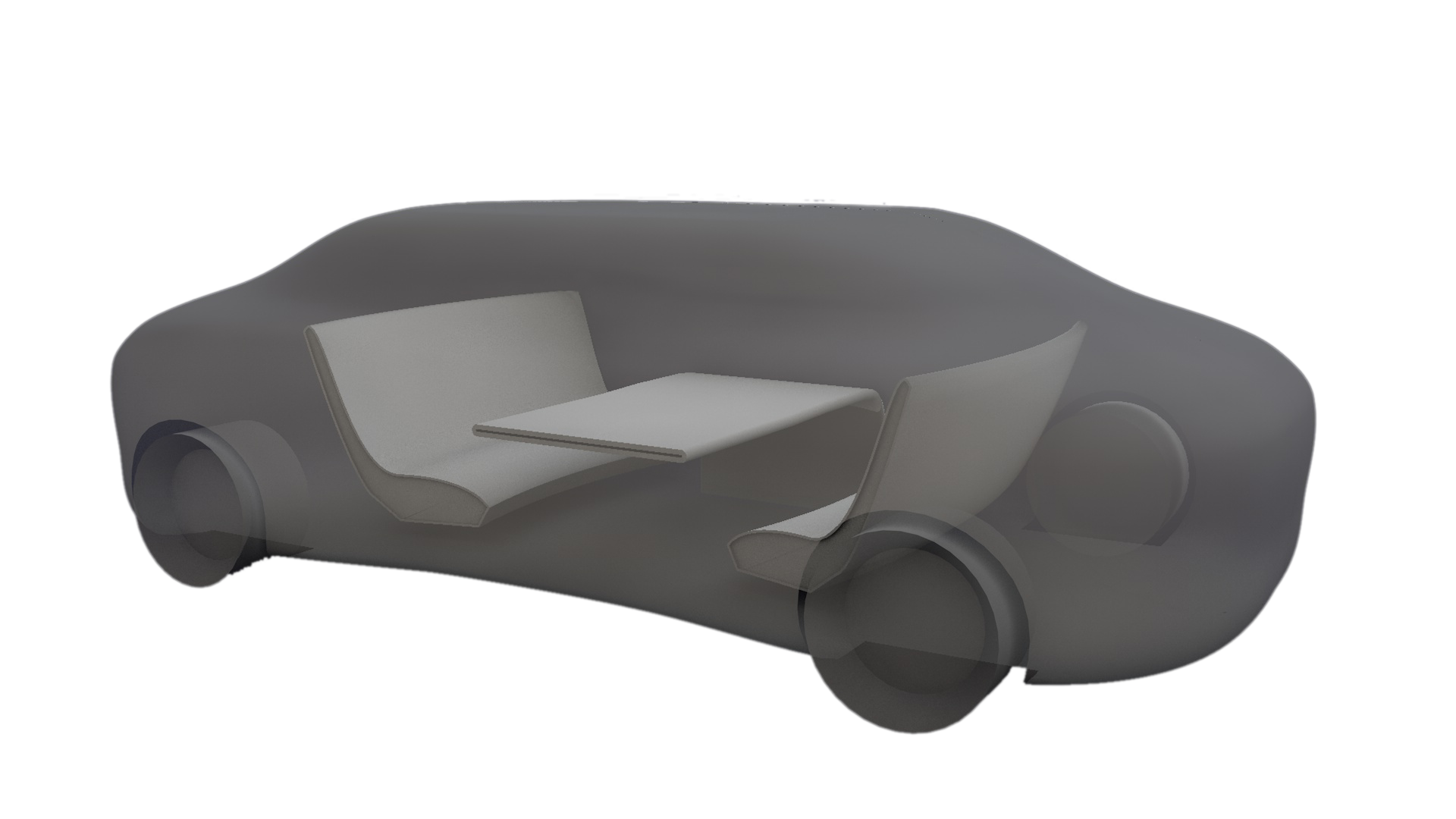
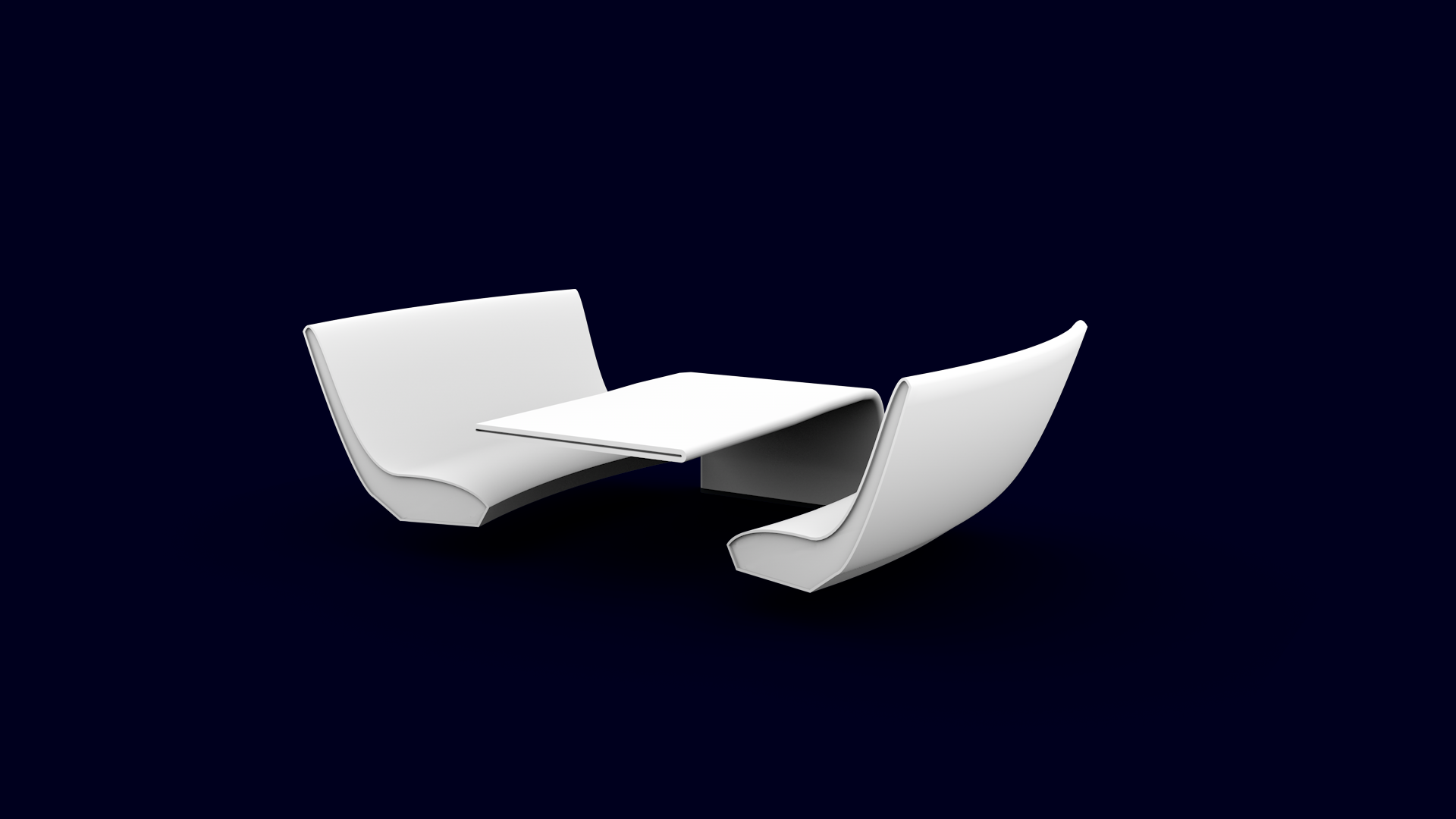
Mit den neuen Möglichkeiten der Elektromobilität wurde ein gänzlich neues Konzept der Innenarchitektur entworfen. Die Ausgangsfrage dafür lautete: “Wie würde die Gestaltung eines autonomen Elektroautos aussehen, wenn es vorher keine Autos gegeben hätte?” So wurden bestehende Konventionen ausgeblendet und eine freie Neukonzeption ermöglicht. Das Ziel war es, ein sitzunabhängiges Fahren zu ermöglichen.
Der soziale Mittelpunkt einer Gesellschaft war schon immer fester Bestandteil jeglicher Kulturen. Die Evolution dieses Mittelpunktes wird vom Zelt über das Haus durch dieses Konzept in das Auto gebracht. Geborgenheit, Zusammenhalt und Wohlbefinden verkörpert der Social Hub.
Daher ist ein Konzept entstanden, in dem das Auto keine Front und kein Heck besitzt, sondern symmetrisch aufgebaut ist. Der Innenraum besteht aus zwei gegenüberliegenden Sitzbereichen und einem mittig angeordneten, modularer Tisch. Dieser fungiert als sozialer Hub. Die Fahrzeuggestaltung bietet so einen sehr reduzierten Grundaufbau, der über das Augmented Reality Bedienkonzept gefüllt wird.
Mehr

Schutz

Zusammenleben

Erleben
Augmented Reality ist ein wichtiger Bestandteil des REEVO Concept. Sowohl das Infotainment-System als auch jegliche Fahrzeugsteuerungen werden mit Hilfe von einer AR-Brille in das Sichtfeld des Fahrers und der Beifahrer projiziert. So ist es möglich auf alle haptische Buttons und Touch-Screens zu verzichten.
Zusätzlich kann der User in der Augmented Reality alle Aufgaben erledigen, für die aktuell ein Smartphone, Tablet oder Laptop verwendet werden. Da alle Mitfahrenden eigene AR Brillen tragen, können sie untereinander mit digitalen Inhalten kooperieren. Dabei geht die zwischenmenschliche Interaktion nicht verloren, da die AR Brille den Nutzer nicht von seiner Umwelt abschottet.
Mehr
Die Steuerung des Fahrzeugs, des Infotainments und der Menüführung für alle weiteren Apps funktioniert über den Controller. Zusätzlich fungiert er als Autoschlüssel und regelt den Wechsel zwischen dem autonomen und dem manuellen Modus. Jeder Mitfahrer hat einen eigenen Controller, auf dem seine persönlichen Daten, Einstellungen und Präferenzen gespeichert sind.
Immer dabei und immer erreichbar.
Für dein Auto,
dein Haus,
dein Büro.
Nimm deine Daten überall mit hin. Deine letzten Links. Deine Dokuemente. Alles.
Ein Gerät für alles. Kompromisslos weit gedacht
Aufgrund von speziellen Verkehrslagen, wie Baustellen, Unfällen oder anderen Hindernissen, oder nicht detailliert kartografierten Straßenabschnitten können autonome Systeme keine 100 prozentige Sicherheit bei der Steuerung garantieren. Deshalb ist es auch bei der Automatisierungsstufe 4 essentiell, dass der Fahrer die Steuerung des Fahrzeuges komplett übernehmen kann.
Die ersten Anwendungen des Lenkprinzips durch ein Lenkrad, dessen Rotation durch eine mechanische Verbindung in einen Einschlag der Räder umwandelt, fand im späten 19. Jahrhundert statt. Seitdem hat sich das Prinzip nicht grundlegend geändert, obwohl in aktuellen Fahrzeugen zwar noch eine mechanische Verbindung zwischen Lenkrad und Lenkachse vorhanden ist, diese jedoch nur im Notfall zur Anwendung kommt, wenn die eigentliche elektrische Lenkung versagt.
In diesem Konzept wurde neues Lenkprinzip entwickelt, das die typische Gestalt des Innenraumes eines Autos komplett verändert. Durch die Position des Lenkrades ist der Fahrerplatz an dessen Position beschränkt. Ein platzunabhängiges Fahren ist somit nicht möglich.
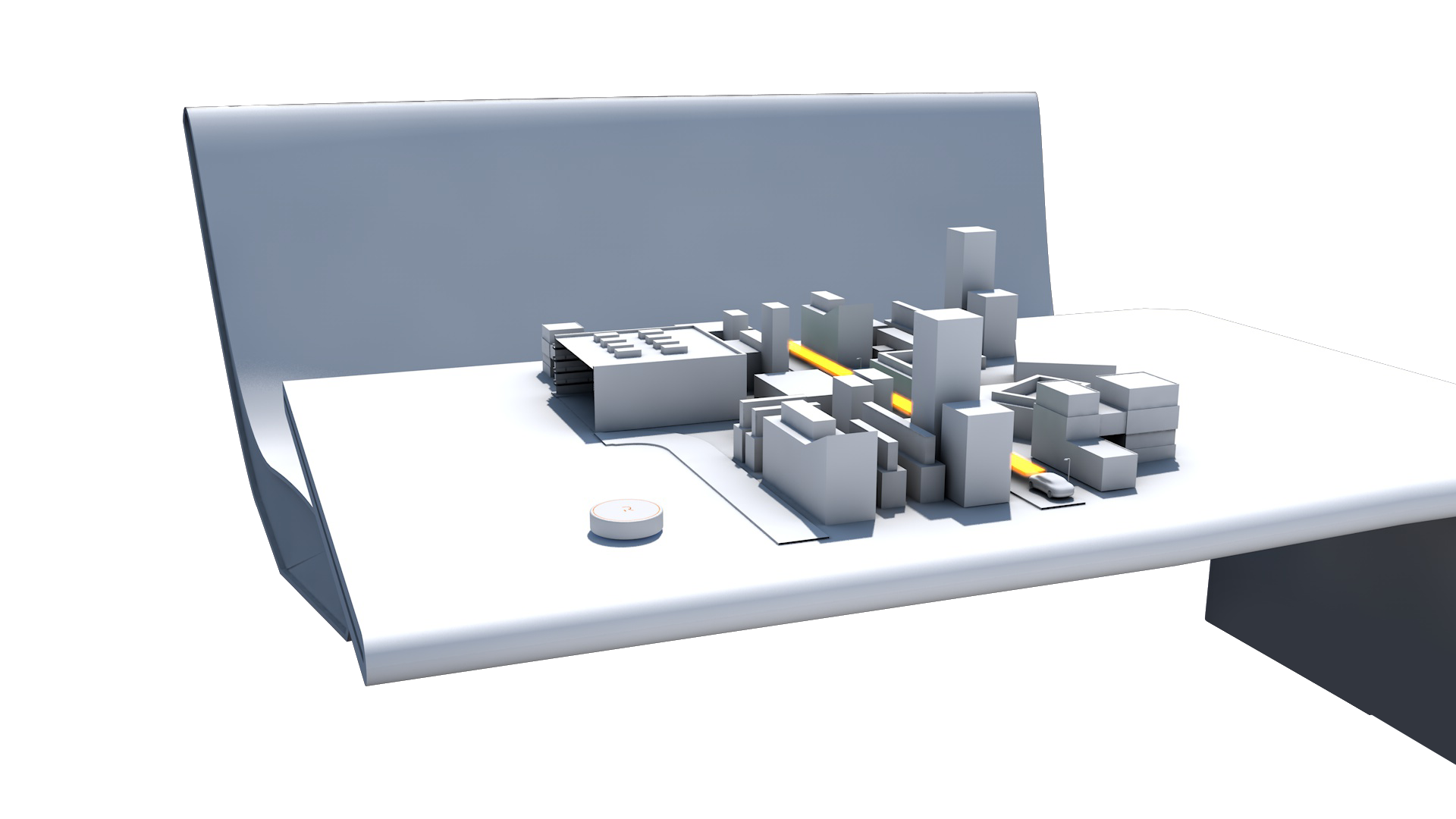
Die Steuerung des Fahrzeuges geschieht durch den Controller, der auf dem Tisch, neben der Projektion platziert wird. Es bildet sich ein Koordinatensystem um den Controller, wobei dieser der Ursprung ist.
Intuitiv wird der Wagen beschleunigt, wenn der Controller nach auf der Y-Achse nach vorne, geschoben wird. Gegensätzlich entschleunigt der Wagen, wenn er zum Ursprung zurückgezogen wird. Somit spiegelt die Y-Achse die Geschwindigkeit des Wagens wieder. Die Position des Controllers ist dabei fest an diese gekoppelt und kehrt somit bei einem Loslassen auch entsprechend des Fahrzeuges zum Ausgangspunkt zurück
Die X-Achse beschreibt den Einschlag der Lenkung. Wenn der Controller auf der Y-Achse auf 50 km/h geschoben wird und gleichzeitig einen negativen X-Wert erreicht, fährt der Wagen eine leichte Linkskurve mit 50 km/h.
Ähnliches eines normalen Lenkrades spiegelt die Position des Controllers den Lenkeinschlag wieder. Auch hier kehrt der Controller synchron zu den Rädern zu seinem Ausgangspunkt zurück, sobald der Controller losgelassen wird. Dadurch muss der Nutzer bei einer Lenkung auch einen gewissen Widerstand überwinden, um eine Fehlbedienung zu vermeiden.
Durch ein Bewegen des Controllers in den negativen Bereich der Y-Achse wird die Rückwärts-Fahrt aktiviert. Diese wird durch einen Widerstand blockiert und kann erst wenn der Wagen still steht erreicht werden. Da im Rückwärtsgang keine hohen Geschwindigkeiten erreicht werden hat die Y-Achse im negativen Bereich nur einen kurze Länge.
Bei langen, geraden Strecken ist es dem Fahrer möglich die Geschwindigkeit zu fixieren und so die Funktion eines Tempomat zu erreichen. Durch ein drücken auf den Controller wird die Position fixiert und es ist nurnoch ein Lenkung möglich. Die Fixierung geschieht durch einen Widerstand der im Notfall überwunden werden kann und so stets der Fahrer die Kontrolle über die Fahrfunktionen behält.
Der Controller vermittelt beim Steuern haptisches Feedback und informiert den Fahrer über relevante informationen.
So wird damit zum Beispiel das Tempolimit spürbar gemacht. Das erkannte Tempolimit bildet auf unserem Koordinatensystem eine unsichtbare Linie auf der Y-Achse. Der Controller snappt magnetisch dann passend auf das Tempolimit ein, sobald man den Controller in die Nähe bewegt. Wenn der Nutzer über dieses Tempolimit beschleunigen möchte kann er den Controller weiter nach oben bewegen, jedoch erhöht sich der Widerstand und er muss mehr Kraft aufwenden, um die Grenze zu überwinden.
Dadurch kommuniziert das System unterbewusst das Tempolimit, ohne den Nutzer zu beschränken.
Eine autonome Fahrt ist möglich wenn die Straße auf der projizierten Karte eine grüne Markierung hat. Wenn dieser Straßenabschnitt erreicht wird bekommt der Fahrer ein Signal und ein Wechsel in den autonomen Modus ist möglich. Der Controller besitzt zwei Seiten: eine manuelle und eine autonome. Der Wechsel erfolgt über ein Umdrehen des Controllers auf die entsprechende Seite.
Der Wechsel erfolgt durch eine symbolische Geste, indem man die Seite des Controllers wechselt. Da der Controller während der manuellen Fahrt auf dem Tisch hält muss dieser vor dem Wechsel gelöst werden. Das geschieht durch langes Drücken. Der Fahrer wird während dieses Vorgangs durch einen sich radial füllenden Fortschrittsbalken über den Prozess informiert. Daraufhin kann der Fahrer den Wechsel durch eine Bestätigung starten und den Controller lösen. Sobald der Controller gelöst ist, fährt der Wagen autonom, dies wird durch ein Pulsieren des Ambient-Light visualisiert.
Mehr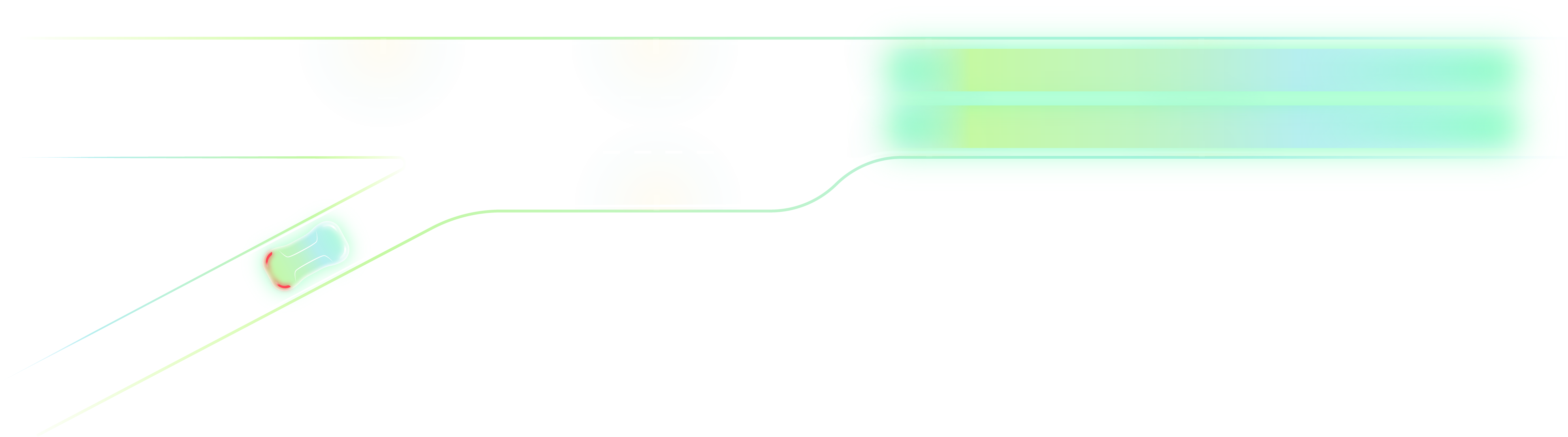
Während der autonomen Fahrt kann der Fahrer seine Aufmerksamkeit von der Straße nehmen und sich anderen Dingen widmen.
Der Controller dient während der autonomen Fahrt als Steuerungsmedium für jegliche Infotainment und Fahrzeugfunktionen. An den Controller wird ein User Interface projiziert, dass die Steuerungsmöglichkeiten visualisiert. Es bildet sich ein radiales Menü, das über mehrere Ebenen hierarchisch erweiterbar ist. Die oberste Ebene ist in drei Bereiche aufgeteilt: Work, Life und Vehicle.
Neben der Arbeit dient das Fahrzeug als Reisemittel. Das Konzept sieht ein ausgeprägtes Infotainment System vor, das durch AR personalisierbar gestaltet werden kann. Jegliche Inhalte können bedarfsgerecht platziert und in der größe variiert werden.
Im Bereich Vehicle kann der Nutzer die Fahrzeugfunktionen steuern. Darunter fallen Elemente wie die Klimaanlage, Sitzposition, Fenstersteuerung und Fahrzeuginformationen.
Die mobile Arbeit ist ein wichtiger Teil des Konzeptes. Dem Fahrer ist es möglich während der Fahrt seine Arbeit fortzuführen. Verschiedenste Apps können im Fahrzeug platziert werden und deren Inhalte mit Passagieren oder online mit Kollegen geteilt werden.
Ein großes Hindernis auf dem Weg zur Akzeptanz von autonomen Fahrzeugen ist das fehlende Vertrauen dem System gegenüber. Die fehlende Kontrolle als Beifahrer ist bereits heute eine unangenehme Situation, die Stress auslösen kann. Nur bei einem vorausschauenden Fahrer kann der Beifahrer vertrauen schöpfen und während der Fahrt entspannen.
Ein autonomes Auto steht hier in besonders skeptischer Betrachtung. Hierbei sind es alleine technische Systeme denen die Passagiere Vertrauen entgegenbringen müssen. Doch einer Maschine zu vertrauen stellt Menschen vor eine andere Herausforderung als einem Menschen gegenüber.
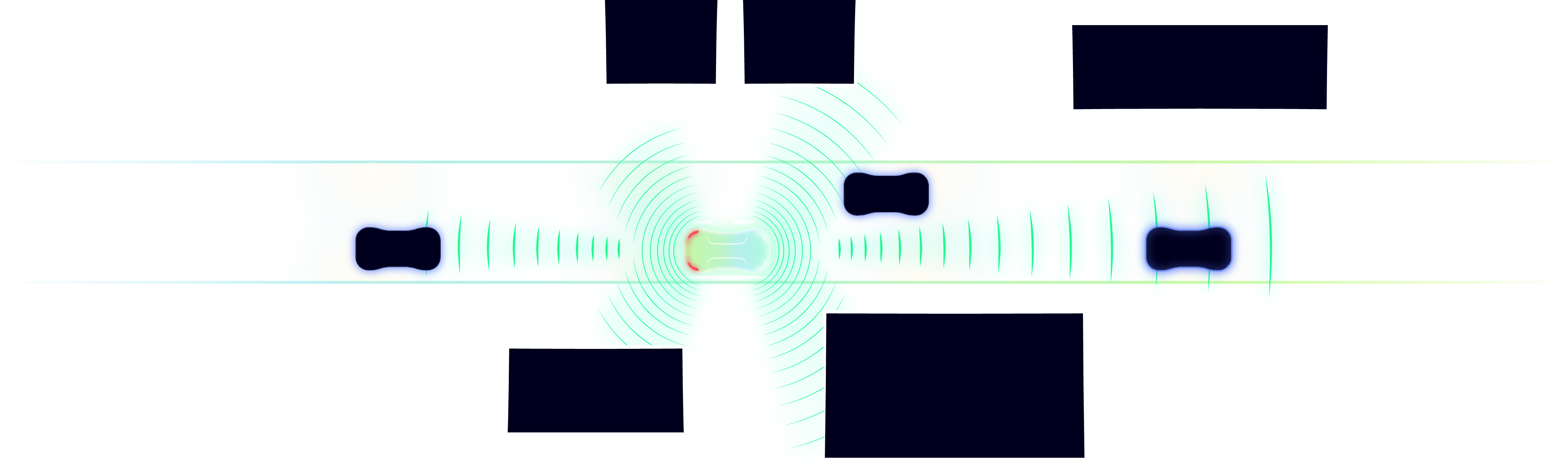
Das System muss somit den Nutzer von sich überzeugen und eine vertrauensvolle Verbindung aufbauen. Um dies zu erreichen, kommunizieren das System, dass es sich der Situation, den anderen Fahrzeugen und Objekten bewusst ist.
Ein LED-Band um das Fahrzeuginneres visualisiert durch ein Leuchten Objekte, die das System um das Fahrzeug herum wahrgenommen hat. Dadurch kommuniziert es ambient dem Fahrer die wahrgenommenen Elemente. Dadurch kann das Fahrzeug dem Nutzer versichern, dass es alle Gefahren, die der Nutzer wahrnimmt auch wahrgenommen hat.
Dieses unterbewusste ambiente Mitteilen schafft vermittelt den Passagieren, dass das Auto im vollem Bewusstsein aller Gefahren das Fahrzeug sicher steuert, ohne dass es hierbei aufdringliche wird.
Das autonome Fahren nach Level 4 beschreibt eine Hochautomatisierung in dem große Strecken vollautonom gefahren werden können. Es können aber noch Situationen auftreten in der der Fahrer die Kontroller wieder übernehmen muss. Man spricht hierbei vom Takeover.
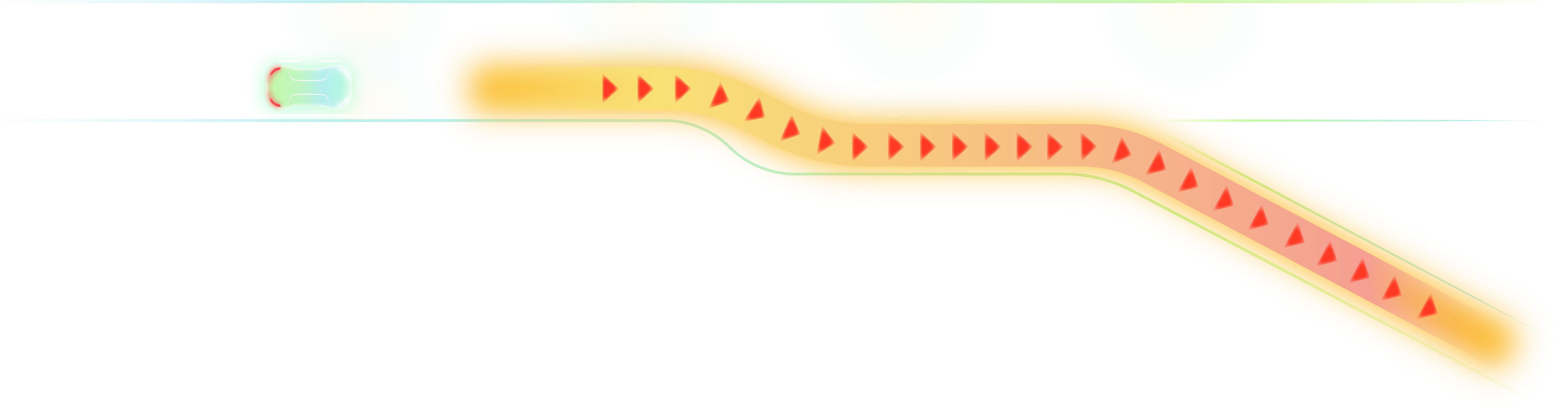
Das Fahrzeug erkennt bereits einige Minuten im Vorraus, dass es einen gewisser Streckenbereich nicht autonom fahren kann. In der AR-Visualisierung der Umgebung kann der Fahrer anhand der Färbung des Straßenverlaufs einsehen, welche Teile der Strecke autonom und welche manuell gefahren werden.
Wenn ein manuelles Fahren vorausgesetzt ist, benachrichtigt das System den Fahrer, dass eine Übernahme stattfinden muss. Dazu wird eine Benachrichtigungs-Kaskade ausgelöst. Wenn er Nutzer bis dahin nicht den Controller in den manuellen Modus gebracht, gelockt und umfasst hat. Bremst das Auto ab und bleibt stehen.